Hello!
I need some assistance with calibrating the camera and tracker with Antilatency.
The camera part works smoothly, but just as soon as I start the tracking calibration I get the "The tracking device was lost" message and cannot finish the process.
I tried all kind of tags, positions of the tags on the camera and nothing. The sensor stays connected by looking at the blinking light on it, but somehow it is lost in the calibration process.
Also, when setting the tag inside Aximmetry, I cannot get a stable readout of its position and cannot define its origin, forward and right placement as it will somehow default to 1.68.
I cannot figure it out. 

Hi,
Before doing the calibration, you should test the tracking in Aximmetry Composer.
We have a guide available to help you verify if you're receiving tracking data in Aximmetry here: https://aximmetry.com/learn/virtual-production-workflow/tracking/how-to-set-up-tracking-systems-in-aximmetry/
First, confirm that you are receiving tracking data through the Native Transf pin of the Camera Tracking module.
If you aren't, let us know which version of the AntilatencyService software you are using and the model of the Anti-Latency device.
Instead of using Origin, Forward, and Right:
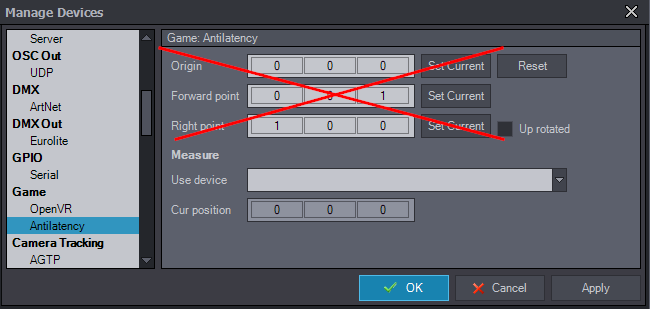
We recommend using the Detect Origin feature, as it is much easier to use. You can learn more about it here:
https://aximmetry.com/learn/virtual-production-workflow/tracking/camera-and-head-transformations/#detect-origin
Also, there is no need to set Origin, Forward, and Right in order to perform camera calibration.
Note: Attaching the printed calibration pattern to a cardboard will not yield accurate results. It is advisable to directly print it on a PVC board to achieve a completely flat surface. Most printing businesses can handle this. The image file for the calibration board which you can download from here: https://aximmetry.com/learn/virtual-production-workflow/tracking/camera-calibrator/#calibration-board includes instructions for the printer, so provide the file as is to any third-party service.
Warmest regards,