We have a mixed compound (3+3 Unreal on Broadcast DE) in a green box here with 2 tracked BMD URSA Broadcast G2 cameras and a DSLR (Nikon Z8) as a static virtual camera for really wide shots, Overviews and the like. 1080p30 PGM signal, I/O on BMD Decklink 8K´s.
Audio is processed completely outside of the system and externally embedded into the final PGM signal. We obviously have to delay the audio quite a bit for this to work, so where do we account for the difference in processing delay between the DSLR and the URSAs so everything stays in lip sync?
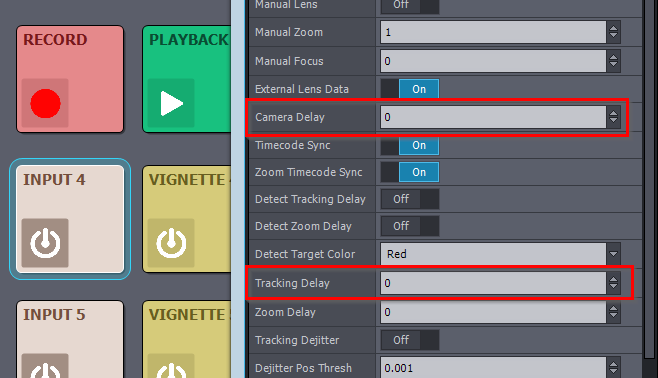
The DSLR comes in about 3,5 frames after the URSAs. Simply setting a corresponding camera delay on their inputs and adding the video delay on top of the existing tracking delay of 0.22 frames won't work right, and we can't seem to find a new, correct tracking delay setting manually.
Setting a negative delay on the DSLR input does not seem to do anything. btw, the system is set to tolerant (7 frames total delay) with 0.7 frames additional delay to account for the fact that not all cameras are genlocked (the DSLR is not). Total audio delay necessary to get the URSA´s in lip sync is 12 frames (measured), but that won't work with the DSLR...
Hi Stefan,
You should delay the final rendered picture to match the audio, you can do that with Delayar modules. For example:

Note that changing the In-to-out Latency setting does not impact negative or positive delays in the Flow Editor. In fact, you can set or achieve any positive delay for different data streams in the Flow Editor.
Additionally, you can achieve greater negative delays in input modules by increasing the Input Extra Delay. More information is available here: https://aximmetry.com/learn/virtual-production-workflow/preparation-of-the-production-environment-phase-i/inner-workings-of-aximmetry/in-to-out-latency/#input-extra-delay-1 But, I strongly advise against modifying this setting. Input Extra Delay is only necessary for special situations where tracking and video are out of sync in a specific way.
Warmest regards,