Hi,
I was creating lens calibration data and ran into some issues; I still haven't found a clear solution. I generated a calibration file using the Aximmetry Camera Calibrator. However, the file isn't extremely accurate, so I usually enable the Basic Calibrator to adjust the generated file for better accuracy.
While tweaking the numbers, I sometimes encounter a situation where Pan and Tilt are accurate, but dolly or moving the camera on the jib is problematic.
It would be greatly appreciated if I could receive tips or advice from all of you.
Thanks.
Hi,
Are the dolly and jib separately tracked? Or for example, do you have a tracking system that has a tracker on your camera?
If the tracker is attached to your camera then it should work on the dolly and jib too. But be careful to not change the position of the tracker on the camera when you place the camera on the dolly or jib. Even a slight change in the rotation of the tracker can hugely affect the calibration's accuracy (Delta head transformation accuracy).
If the dolly and jib are tracked and you do only lens calibration. After that, you set the camera on the dolly, and you try to manually give the Delta head transformation in the Basic Calibrator. Then it will be very hard to set an accurate rotation for the Delta head transformation.
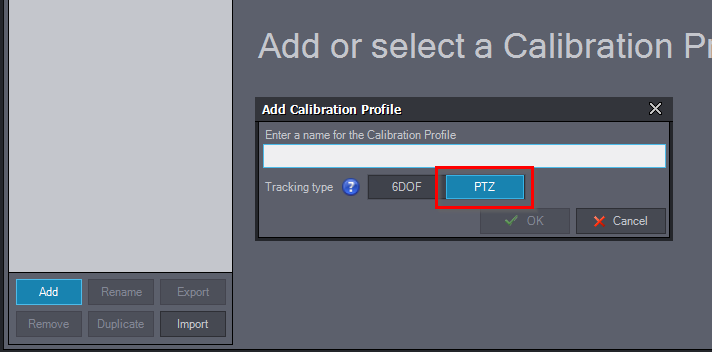
I would suggest doing at least PTZ calibration in this case:
And read the Delta head transformation values from that calibration.
If you have tracked dolly and jib plus a PTZ with its own tracking, then you can combine both trackings in Aximmetry. You can read more about that here: https://aximmetry.com/learn/virtual-production-workflow/preparation-of-the-production-environment-phase-i/tracking/how-to-set-up-tracking-systems-in-aximmetry/#special-cases
Warmest regards,