After watching this video (https://youtu.be/fKEodO0hJW0?t=35) , some search online and some quick self-education on the subject I have a few questions.
For a virtual camera setup (no tracking), to accomplish what is done in the video, is it as simple as
a) have 2 video signals (one from unreal and one from the actual camera)
b) detect, with the marker detector, the poses for both markers. Since we have R = the position vector for marker one, and U = the position vector for the unreal marker, moving the virtual camera would be as easy as applying a position shift by R-U. So now both cameras are at the same point, and we are left to adjust rotations
1. Is this the way to proceed?
2. Has anyone done that inside Aximmetry?
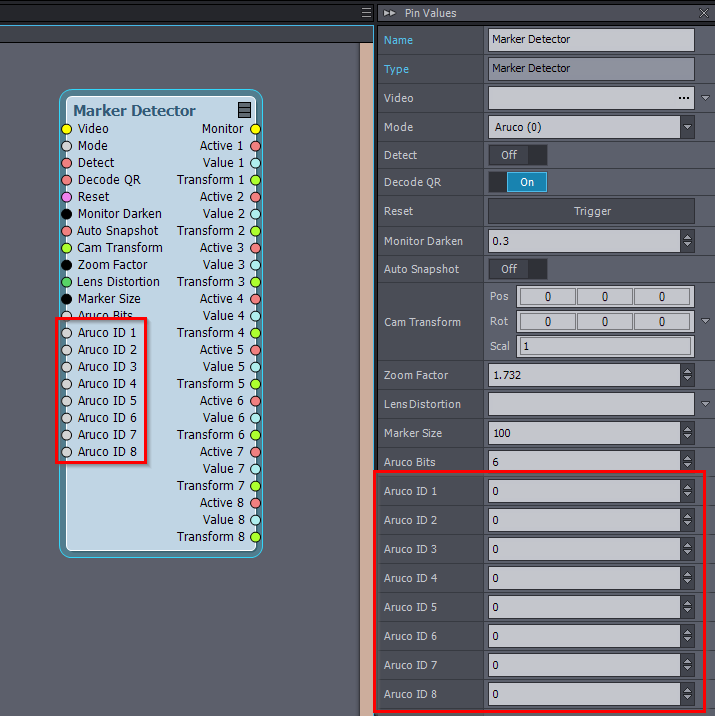
3. The marker detector has 8 output transforms. Are these the transforms for the first 8 ID's of the Aruco dictionary? We do not select the ID, but just select the transform?
Thank you in advance
Kostas
Hi Kostas
I don't really see why would you want to detect the Aruco from Unreal, even though they probably did it like that in the video.
Just detect the Aruco in the real world and place the object in the virtual world based on that transformation with the right pivot.
You can actually set 8 IDs in the Market Detector. The 8 Output Transforms match these IDs.
A little tip, you probably want to use Smooth Transformation with the Marker Detector to get a more stable position. You can set an extra delay in the camera compound to match the Smooth Transformation's delay.
If everything is static and stationary, then use the Hold Transformation module to fix the transformation of the marker once it is measured. You can use the Smooth Transformation even in this case.
Warmest regards,