

I am using a camera mounted on a robotics crane without any external camera tracking system.
The camera is a Canon C400 with an RF 24–105mm F2.8 lens, and the crane is manufactured by MJ Robotics.
Communication is handled via freeD, and since it is a crane, there is movement along the Z-axis.
Lens data is received via Canon CV, so only tracking calibration is required. However, because the crane is fixed to the floor, tracking calibration is not possible.
In this situation, could you please advise on how the calibration process should be performed?
Hi,
It looks like that crane is capable of Z-axis (depth) movement. However, if it cannot actually move along the Z-axis, you will likely be unable to perform the tracking calibration in the Camera Calibrator.
Instead, you will need to measure the distance between the point where the freeD protocol reports the camera's position and the actual location of the camera's sensor. Then, enter this measured offset as the Delta Head Transformation in Aximmetry: https://aximmetry.com/learn/virtual-production-workflow/tracking/advanced-information-and-features/camera-and-head-transformations/#delta-head-transf
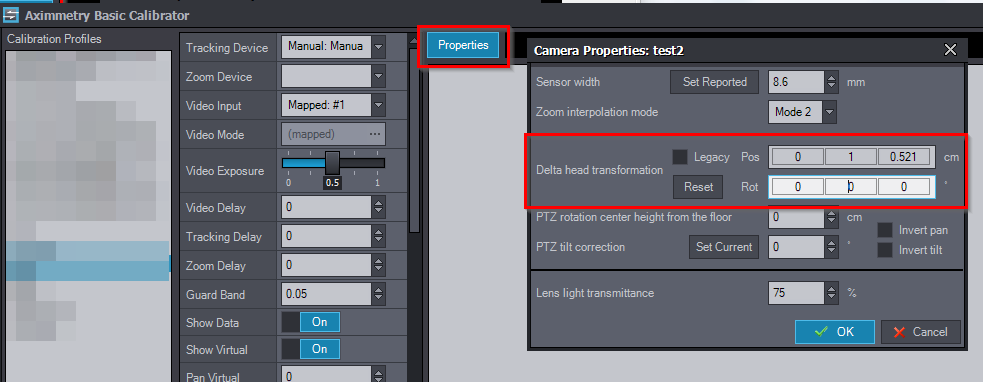
Alternatively, you can enter this value within the calibration file using the Basic Calibrator, as shown below:
Warmest regards,